GPS 모듈은 IoT 기기의 가장 필수적인 구성 요소 중 하나입니다. 주로 현재 위치의 좌표를 확인하는 데 사용되며 그 외에도 다양한 용도로 사용됩니다. 이 튜토리얼에서는 GPS 모듈, 특히 Ublo의 인기 있는 NEO-6M GPS 모듈의 문제 해결 방법을 살펴보겠습니다 . 또한 이 튜토리얼은 Arduino UNO와 함께 NEO 6M GPS 모듈을 사용한다는 가정 하에 작성되었지만, ESP32, Arduino Nano 또는 Raspberry Pi와 같은 다른 개발 보드의 지침도 따를 수 있습니다. 여기서는 NEO 6M GPS 모듈을 USB-UART 변환기에 연결하여 작동 여부를 확인합니다. 하드웨어가 제대로 작동하는지 확인한 후에는 간단한 Arduino GPS 인터페이싱 튜토리얼을 따라 GPS 프로젝트를 시작할 수 있습니다.
Neo 6M GPS 모듈 빠른 문제 해결 단계
Neo 6M GPS 모듈이 작동하지 않는 경우 확인해야 할 중요한 5가지 사항은 다음과 같습니다.
- 전원 연결(3.3V~5V)을 확인하세요
- 안테나 연결 확인
- 통신 속도 설정 확인(9600)
- NMEA 출력 테스트
- 위성 신호 수신 확인
아래 표는 Neo 6M GPS 모듈 사용 시 발생하는 일반적인 문제와 해결 방법을 요약한 것입니다.
Problem |
Common Cause |
Solution |
| No LED Blinking | Poor satellite reception | Relocate antenna |
| No NMEA Data | Incorrect baud rate | Set to 9600 baud |
| Invalid Location | Insufficient satellites | Move to open area |
위의 간단한 해결책을 시도했는데도 Neo 6m GPS 모듈이 작동하지 않더라도 걱정하지 마세요. 저희가 모듈을 자세히 살펴보고, 저희가 얻은 지식과 경험을 공유하여 여러분이 즉시 작동하도록 도와드리겠습니다. 자, 이제 기본 사항부터 시작해 보겠습니다.
U-blox Neo 6M GPS 모듈 - 기본 사항
Neo 6 시리즈는 U-blox에서 가장 인기 있는 GPS 모듈로, 위치 추적 및 내비게이션 애플리케이션에 널리 사용됩니다. 컴팩트한 디자인과 높은 정확도의 GPS 데이터를 제공하여 로봇, 드론, IoT 프로젝트 등 다양한 분야에 활용 가능합니다.
안테나가 있는 Neo 6M GPS 모듈을 보여주는 이미지
이 모듈에는 u-blox 6 엔진이 탑재되어 있어 여러 내비게이션 시스템을 지원하여 빠르고 안정적인 위성 위치 추적을 제공합니다. 또한 효율적인 전력 소비로 배터리 구동 애플리케이션에 이상적입니다. 여러 위성을 추적할 수 있는 NEO-6M은 다양한 프로젝트에 적합한 다재다능하고 안정적인 GPS 솔루션입니다.

NEO 6M GPS 모듈 부품 마킹
하지만 NEO-6M GPS 모듈의 한 가지 문제점은 크리스털과 ROM이 포함된 버전이 더 이상 생산되지 않는다는 것입니다. 즉, U-blox 팀의 공식 지원이 더 이상 제공되지 않습니다. 신제품을 개발 중이라면 고급형 시리즈를 고려해 보는 것이 좋습니다. 그렇다고 해서 NEO-6M이 쓸모없다는 것은 아닙니다. 단지 구형 모델일 뿐입니다.
이제 Neo-6M의 기본 사항을 살펴보았으니, 문제 해결 방법을 알아보겠습니다.
NEO 6M GPS 모듈이 작동하지 않나요?
NEO 6M GPS 모듈을 사용하여 첫 프로젝트를 진행했는데 예상대로 작동하지 않는다면 걱정하지 마세요. 여러분만 그런 것은 아닙니다. circuitdigest는 NEO 6M GPS 모듈을 사용하여 수많은 프로젝트를 진행하면서 종종 문제에 직면해 왔습니다. 그래서 여러분을 위해 이 종합적인 문제 해결 가이드를 만들었습니다.
저희의 계획은 UART-USB 방식을 사용하여 GPS 모듈을 컴퓨터에 연결하고 문제의 원인을 하드웨어 또는 소프트웨어 관련 여부와 관계없이 확인하는 것입니다. 문제가 확인되면 적절한 해결책을 제시해 드리겠습니다.
Neo 6M GPS 모듈 연결 문제
NEO6M GPs 모듈을 사용할 때 가장 흔한 문제는 배선에서 발생하므로, 먼저 연결이 제대로 되었는지 확인해 보겠습니다.
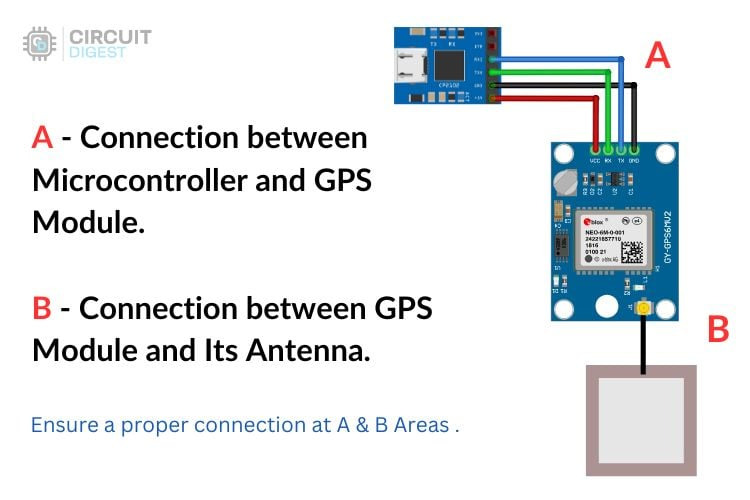
저는 CP2102 기반 USB-UART 브리지를 사용하고 있습니다. 아래는 따라야 할 올바른 회로도입니다. 연결 시 가는 점퍼선을 사용하고 있는지 확인하세요. 경우에 따라 문제가 발생할 수도 있습니다. 마찬가지로 안테나 선 또한 점검해야 합니다.
CP2102 및 NEO 6m용 회로도
CP2102와 NEO 6m의 회로도
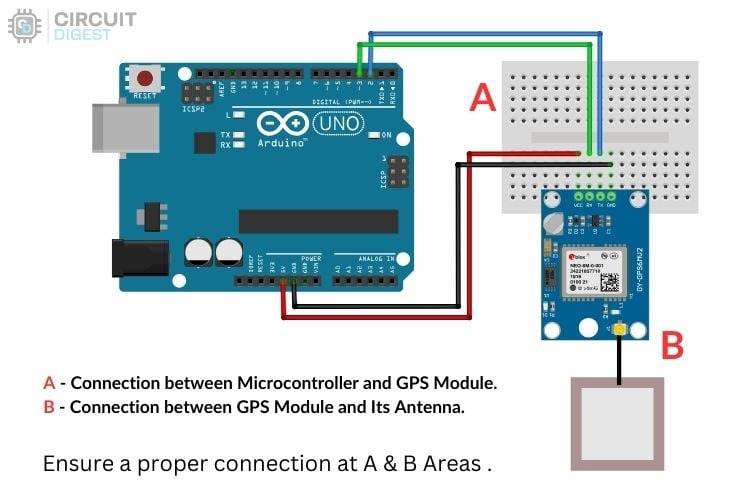
Arduino와 같은 개발 보드에 NEO 6M GPS 모듈을 연결할 때 주의해야 할 두 가지 주요 영역이 있습니다.
A. USB-UART 브리지(또는 마이크로컨트롤러)와 GPS 모듈 간의 연결:
일반적으로 신호선 2개와 전원선 2개, 총 4개의 선이 있습니다. 이 모듈에는 전압 레귤레이터가 내장되어 있어 3.3V에서 5V까지의 전압 범위를 수용합니다. 신호 핀인 TX와 RX는 각각 USB-UART 브리지의 RX와 TX에 연결해야 합니다.
B. 안테나와 GPS 모듈 간의 연결:
일반적으로 모듈에는 IPEX 커넥터가 있습니다. 문제가 의심되면 커넥터를 이소프로필 알코올로 닦고 단단히 고정하십시오. 느슨한 접촉 부분이 있는지 확인하고, 필요한 경우 작은 펜치를 사용하여 커넥터의 금속 고정 부분을 살짝 구부려 단단히 연결하십시오.

안테나, 금속 실드, CP2102 및 NEO 6m용 하드웨어 연결
모든 연결이 완벽하면 모듈이 정상적으로 작동할 것입니다. 그렇지 않으면 다음 단계로 넘어가겠습니다.
Neo 6M GPS 모듈이 응답하지 않음(출력 없음)
연결 문제가 없다고 가정하고 이제 NEO-6M의 UART 포트에서 NMEA 출력을 확인해 보겠습니다.
NEO-6M 모듈은 기본적으로 트리거 없이 송신 핀을 통해 NMEA 데이터를 출력합니다. 데이터를 보려면 시리얼 모니터링 프로그램의 통신 속도를 NEO-6M의 기본 통신 속도인 "9600"으로 설정해야 합니다.
다음으로 하드웨어 섹션으로 넘어가겠습니다.
USB-시리얼 브리지/디버거가 있다면 사용할 수 있습니다. 또는 Arduino Uno나 다른 마이크로컨트롤러를 USB-UART 브리지로 사용할 수도 있습니다. Arduino Uno를 USB-UART 브리지로 변환하는 코드는 Git 저장소에서 찾을 수 있습니다.
작동하는 USB-시리얼 변환기를 사용하여 앞서 설명한 대로 회로를 연결하세요. 다음으로, 연결된 장치의 통신 포트 번호(예: "COM3")를 확인하세요.
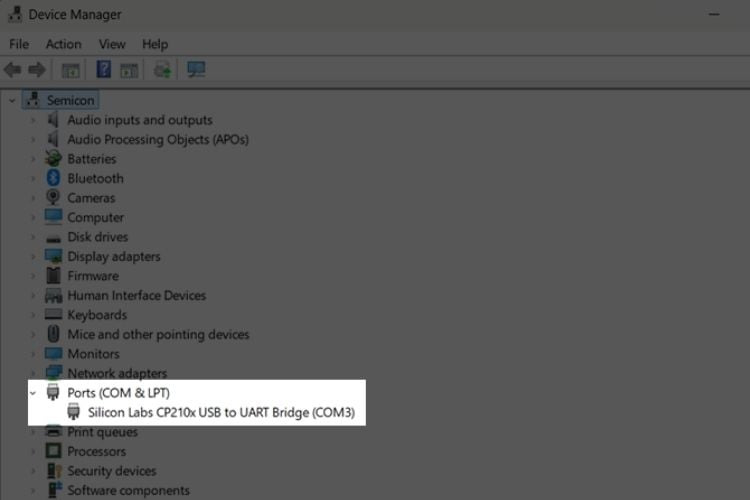
장치 관리자에 표시되는 포트 세부 정보
Arduino IDE를 열고 SerialMonitor를 실행하세요. 통신 속도를 "9600"으로 설정하세요. 모듈이 정상적으로 작동하면 텍스트가 계속 출력되어야 합니다. 이는 모듈이 정상적으로 작동하며 심각한 손상이 없음을 나타냅니다.
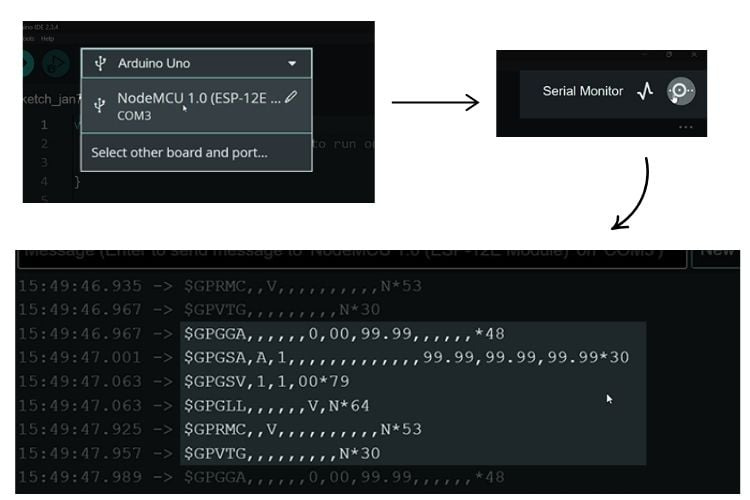
직렬 모니터를 여는 절차
데이터가 출력되지 않으면 모듈이 충분한 위성 신호를 수신하지 못하고 있다는 의미일 수 있습니다. 위치를 정확하게 파악하려면 최소 4개의 위성 신호가 필요합니다. 위치 정보가 없으면 NMEA 시퀀스에 데이터가 없습니다.
NMEA 시퀀스 인쇄
충분한 위성이 감지되면 GPS 모듈의 LED가 1초 간격으로 깜박이기 시작합니다. 깜박임이 없으면 모듈이 아직 위성 신호를 찾고 있는 것입니다. 이제 데이터 분석을 시작해 보겠습니다.
NEO-6M GPS 연결 문제 해결 방법
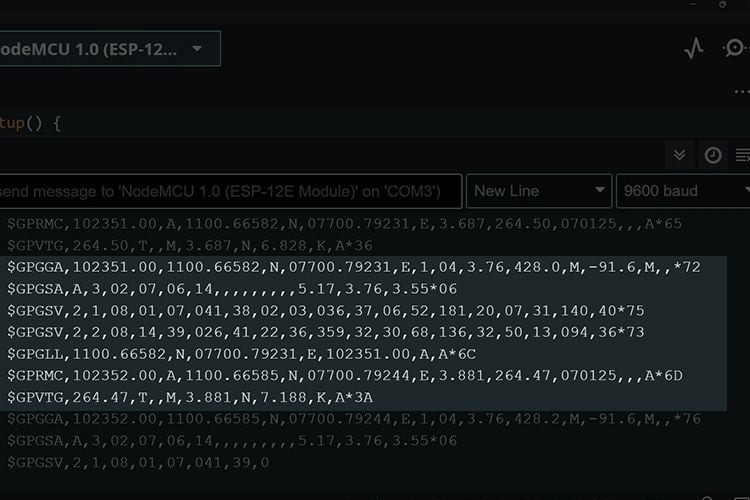
위의 모든 과정이 성공적으로 통과되면 이제 NMEA 시퀀스에서 위치 데이터를 확인해야 합니다.
위치 및 시간 데이터를 위한 GPGLL
데이터 시리즈에서 $GPGLL로 시작하는 문장에는 위치와 시간 데이터가 포함되어 있습니다. 나머지 문장에는 고급 사용자가 사용하는 중요한 정보가 포함되어 있습니다.
$GPGLL 문장은 다음과 같은 형식을 갖습니다:
$GPGLL, 위도, 위도 방향, 경도, 경도 방향, 시간, 유효성, 모드*체크섬
$GPGLL, latitude, latitude direction, longitude, longitude direction, time, validity, mode*checksum
GPGLL 문장의 분석:
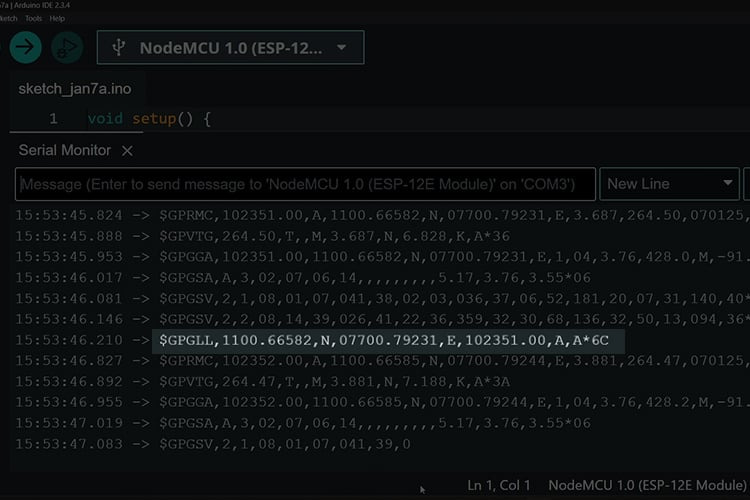
위 이미지에서 강조된 $GPGLL 문장의 분석은 아래와 같습니다.
- 위도: 1100.66582 - 이는 위도를 도와 분으로 나타냅니다. 북위 11도 00.66582분입니다.
- 위도 방향: N - 이는 위도가 북반구에 있음을 나타냅니다(남반구의 경우 S).
- 경도: 07700.79231 - 이는 경도를 도와 분으로 나타냅니다. 동경 77도 00.79231분입니다.
- 경도 방향: E - 이는 경도가 동반구에 있음을 나타냅니다(서반구의 경우 W).
- 시간: 102351.00 - 이는 HHMMSS.sss 형식의 UTC 시간(10:23:51.000 UTC)입니다.
- 유효성: A - 이는 데이터가 유효함을 의미하며, GPS가 양호한 위성 정보를 가지고 있음을 나타냅니다(V인 경우 데이터가 유효하지 않음을 나타냅니다).
- 모드: A - 자율 모드를 나타냅니다. 즉, GPS가 자체적인 내부 계산을 사용하여 위치를 계산한다는 의미입니다.
- 체크섬: *6C - 데이터가 손상되지 않았는지 확인하기 위한 오류 검사입니다.
결론적으로, NEO-6M GPS 모듈을 사용하여 데이터를 정확하고 효율적으로 수집하는 방법에 대한 귀중한 통찰력을 얻었습니다. NMEA 문장의 구조와 GPS가 제공하는 정보를 해석하는 방법을 이해하면 내비게이션, 위치 추적, 시간 동기화 등 다양한 응용 분야에서 이 모듈을 활용할 수 있습니다.
더 자세히 알아보려면 FAQ 섹션을 참조하세요. 이 섹션에는 추가 자료와 일반적인 질문에 대한 답변이 있어 해당 주제를 더 깊이 있게 알아보고 이해도를 넓히는 데 도움이 됩니다.
일반적인 GPS 모듈 문제 및 해결 방법
- NEO-6M의 LED가 깜박이지 않나요?
NEO-6M 모듈의 단일 LED는 전원 표시등이 아니라 상태 표시등입니다. 이 LED는 NEO-6M 모듈의 시간 펄스 출력 핀에 연결됩니다. 기본적으로 위치 고정 표시등 역할을 합니다. NEO 6M GP 모듈의 LED 동작 방식은 다음과 같습니다.
- 깜박임 없음: NEO-6M 모듈이 위성 신호를 탐색 중입니다.
- 1초마다 깜박임: NEO-6M 모듈이 위치를 고정할 만큼 충분한 위성을 감지했습니다.
모듈의 LED가 1초 간격으로 깜박이면 정상적으로 작동하는 것입니다.
- NEO-6M GPS 모듈이 위성에 연결되지 않나요?
안테나 위치는 위성 신호를 제대로 수신하는 데 매우 중요합니다. NEO 6M GPS 모듈이 위성에 제대로 연결되도록 다음 지침을 따르세요.
- 안테나의 방사면(윗부분의 금속 패치)이 하늘을 향해 위를 향하도록 위치시킵니다.
- GPS 신호를 차단하거나 반사할 수 있는 벽, 지붕, 금속 물체 등 장애물 근처에 있지 마세요.
- 신호 왜곡을 방지하려면 GPS 모듈을 비전도성 표면에 놓으세요.
- 안테나를 Wi-Fi 라우터, 모터 또는 고전력 전자 장치와 같은 전자기 간섭(EMI) 발생원으로부터 멀리 두십시오.
- 여러 개의 모듈을 사용하는 경우 교차 간섭을 방지하기 위해 다른 안테나와 거리를 유지하세요.
- 안테나 케이블이 심하게 구부러지거나 손상되지 않도록 주의하세요. 손상되면 신호 품질이 저하될 수 있습니다.
- 실외에서 사용하는 경우 적절한 케이스를 사용하여 비, 먼지, 극한 온도 등의 환경적 요인으로부터 안테나를 보호하세요.
- GPS 모듈 NMEA 데이터 문제 해결
미국 해양 전자 협회(NMEA)는 GPS 시스템에서 널리 사용되는 표준 데이터 형식입니다. NMEA 데이터의 $GPGLL 문장은 위도, 경도, UTC 시간, 그리고 수정값의 유효성을 포함한 필수적인 지리적 위치 정보를 제공합니다. 다음은 NMEA 형식과 예시입니다.
$GPGLL, 위도, 위도 방향, 경도, 경도 방향, 시간, 유효성, 모드*체크 합계
$GPGLL, latitude, latitude direction, longitude, longitude direction, time, validity, mode*chec sum
예를 들어:
아래는 GPS 모듈에서 수신한 데이터로, 위의 데이터 형식과 유사합니다.
$GPGLL, 1100.66265, N, 07700.78513, E, 073843.00, A, A*6B
하지만 DTM, GBS, GGA, GLL, GPQ, GRS, GSA, GST, GSV, RMC, THS, TXT, VTG 등 더 많은 문장이 있습니다. 자세한 내용은 공식 U-blox 수신기 설명서를 참조하십시오.
Neo 6M GPS 모듈에 대해 자세히 알아보세요
이 문제 해결 가이드를 통해 NEO 6M GPS 모듈이 제대로 작동하는 데 도움이 되었기를 바랍니다. NEO 6M GPS 모듈에 대해 자세히 알아보고 이를 사용하여 무엇을 만들 수 있는지 알아보려면 다른 튜토리얼도 확인해 보세요.
아래 링크는 위 튜토리얼 원문을 확인하세요. 이 링크를 따라가세요.
ESP32 개발 보드와 함께 Neo 6M GPS 모듈을 사용하는 방법
Atmega16/32 AVR 마이크로컨트롤러가 포함된 인터페이스 Neo 6M GPS 모듈
차량 또는 자산 추적 프로젝트에 가장 적합한 GPS 모듈을 선택하는 방법
NodeMCU와 함께 Neo 6M GPS 모듈을 사용하는 방법
Neo 6M GPS 모듈과 Google Maps를 사용하여 나만의 GPS 위치 추적기를 만들어 보세요.
'ESP32' 카테고리의 다른 글
| GPS 데이터 지도에 그려주는 사이트 (0) | 2025.11.29 |
|---|---|
| ESP32 NEO-6M GPS 모듈 인터페이스 (0) | 2025.11.28 |
| FreeRTOS ESP32 듀얼 코어를 사용하는 방법 Arduino IDE (0) | 2025.11.27 |
| ESP-32 LVGL 그래픽을 사용한 고급 기술 - 5부 (0) | 2025.11.27 |
| ESP-32 LVGL 그래픽을 사용한 고급 기술 - 4부 (0) | 2025.11.27 |
| ESP-32 LVGL 그래픽을 사용한 고급 기술 - 3부 (0) | 2025.11.26 |
| ESP-32 LVGL 그래픽을 사용한 고급 기술 - 2부 (0) | 2025.11.26 |
| ESP-32 LVGL 그래픽을 사용한 고급 기술 - 1부 (1) | 2025.11.24 |
취업, 창업의 막막함, 외주 관리, 제품 부재!
당신의 고민은 무엇입니까? 현실과 동떨어진 교육, 실패만 반복하는 외주 계약,
아이디어는 있지만 구현할 기술이 없는 막막함.
우리는 알고 있습니다. 문제의 원인은 '명확한 학습, 실전 경험과 신뢰할 수 있는 기술력의 부재'에서 시작됩니다.
이제 고민을 멈추고, 캐어랩을 만나세요!
코딩(펌웨어), 전자부품과 디지털 회로설계, PCB 설계 제작, 고객(시장/수출) 발굴과 마케팅 전략으로 당신을 지원합니다.
제품 설계의 고수는 성공이 만든 게 아니라 실패가 만듭니다. 아이디어를 양산 가능한 제품으로!
귀사의 제품을 만드세요. 교육과 개발 실적으로 신뢰할 수 있는 파트너를 확보하세요.
캐어랩



