반응형
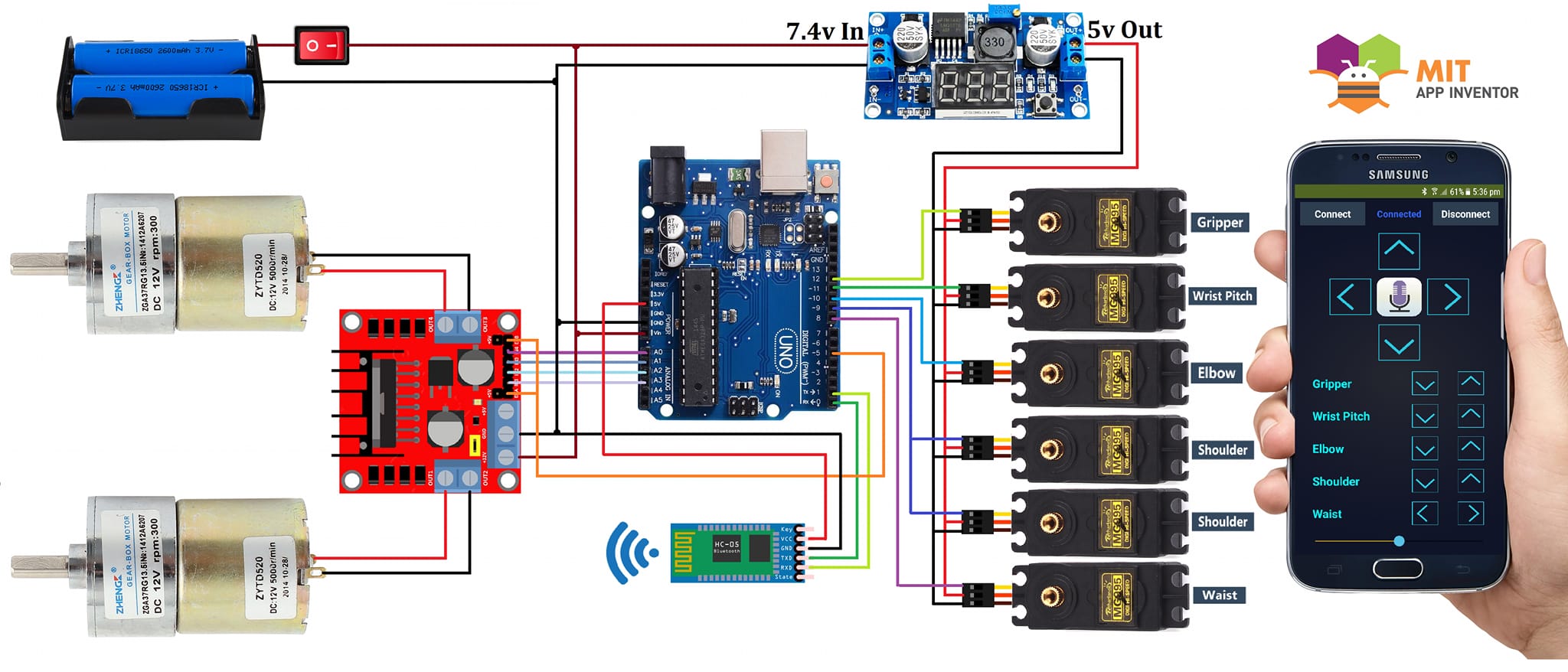
//이것은 로봇 팔이 달린 로봇 자동차의 코드
//FB와 유투브 테크 자이드에서 팔로우하세요.
코드
//THIS THE CODE FOR ROBOTIC CAR WITH ROBOTIC ARM
//FOLLOW ME ON FB AND YOUTUBE TECH ZAID
#include <Servo.h>
Servo motor_1;
Servo motor_2;
Servo motor_3;
Servo motor_4;
Servo motor_5;
#define enA 5 //Enable1 L298 Pin enA
#define in1 A3 //Motor1 L298 Pin in1
#define in2 A2 //Motor1 L298 Pin in1
#define in3 A1 //Motor2 L298 Pin in1
#define in4 A0 //Motor2 L298 Pin in1
#define enB 5 //Enable2 L298 Pin enB
int servo1 = 90;
int servo2 = 110;
int servo3 = 40;
int servo4 = 50;
int servo5 = 90;
int bt_data;
int Speed = 130;
void setup(){
Serial.begin(9600); // initialize serial communication at 9600 bits per second:
motor_1.attach(8);
motor_2.attach(9);
motor_3.attach(10);
motor_4.attach(11);
motor_5.attach(12);
motor_1.write(servo1);
motor_2.write(servo2);
motor_3.write(servo3);
motor_4.write(servo4);
motor_5.write(servo5);
pinMode(enA, OUTPUT); // declare as output for L298 Pin enA
pinMode(in1, OUTPUT); // declare as output for L298 Pin in1
pinMode(in2, OUTPUT); // declare as output for L298 Pin in2
pinMode(in3, OUTPUT); // declare as output for L298 Pin in3
pinMode(in4, OUTPUT); // declare as output for L298 Pin in4
pinMode(enB, OUTPUT); // declare as output for L298 Pin enB
delay(1000);
}
void loop(){
//if some date is sent, reads it and saves in state
if(Serial.available() > 0){
bt_data = Serial.read();
Serial.println(bt_data);
if(bt_data > 20){Speed = bt_data;}
}
analogWrite(enA, Speed); // Write The Duty Cycle 0 to 255 Enable Pin A for Motor1 Speed
analogWrite(enB, Speed); // Write The Duty Cycle 0 to 255 Enable Pin B for Motor2 Speed
if(bt_data == 1){forword(); } // if the bt_data is '1' the DC motor will go forward
else if(bt_data == 2){backword();} // if the bt_data is '2' the motor will Reverse
else if(bt_data == 3){turnLeft();} // if the bt_data is '3' the motor will turn left
else if(bt_data == 4){turnRight();} // if the bt_data is '4' the motor will turn right
else if(bt_data == 5){Stop(); } // if the bt_data '5' the motor will Stop
else if(bt_data == 6){turnLeft(); delay(400); bt_data = 5;}
else if(bt_data == 7){turnRight(); delay(400); bt_data = 5;}
else if (bt_data == 8){
if(servo1<180){servo1 = servo1+1;}
motor_1.write(servo1);
}
else if (bt_data == 9){
if(servo1>0){servo1 = servo1-1;}
motor_1.write(servo1);
}
else if (bt_data == 10){
if(servo2>0){servo2 = servo2-1;}
motor_2.write(servo2);
}
else if (bt_data == 11){
if(servo2<180){servo2 = servo2+1;}
motor_2.write(servo2);
}
else if(bt_data == 12){
if(servo3>0){servo3 = servo3-1;}
motor_3.write(servo3);
}
else if (bt_data == 13){
if(servo3<180){servo3 = servo3+1;}
motor_3.write(servo3);
}
else if (bt_data == 14){
if(servo4<180){servo4 = servo4+1;}
motor_4.write(servo4);
}
else if(bt_data == 15){
if(servo4>0){servo4 = servo4-1;}
motor_4.write(servo4);
}
else if (bt_data == 16){
if(servo5>90){servo5 = servo5-1;}
motor_5.write(servo5);
}
else if (bt_data == 17){
if(servo5<150){servo5 = servo5+1;}
motor_5.write(servo5);
}
delay(30);
}
void forword(){ //forword
digitalWrite(in1, HIGH); //Right Motor forword Pin
digitalWrite(in2, LOW); //Right Motor backword Pin
digitalWrite(in3, LOW); //Left Motor backword Pin
digitalWrite(in4, HIGH); //Left Motor forword Pin
}
void backword(){ //backword
digitalWrite(in1, LOW); //Right Motor forword Pin
digitalWrite(in2, HIGH); //Right Motor backword Pin
digitalWrite(in3, HIGH); //Left Motor backword Pin
digitalWrite(in4, LOW); //Left Motor forword Pin
}
void turnRight(){ //turnRight
digitalWrite(in1, LOW); //Right Motor forword Pin
digitalWrite(in2, HIGH); //Right Motor backword Pin
digitalWrite(in3, LOW); //Left Motor backword Pin
digitalWrite(in4, HIGH); //Left Motor forword Pin
}
void turnLeft(){ //turnLeft
digitalWrite(in1, HIGH); //Right Motor forword Pin
digitalWrite(in2, LOW); //Right Motor backword Pin
digitalWrite(in3, HIGH); //Left Motor backword Pin
digitalWrite(in4, LOW); //Left Motor forword Pin
}
void Stop(){ //stop
digitalWrite(in1, LOW); //Right Motor forword Pin
digitalWrite(in2, LOW); //Right Motor backword Pin
digitalWrite(in3, LOW); //Left Motor backword Pin
digitalWrite(in4, LOW); //Left Motor forword Pin
}
반응형
'메이커 Maker' 카테고리의 다른 글
| 2축 태양광 추적기 아두이노 프로젝트 (2) | 2024.12.05 |
|---|---|
| 태양광 패널 추적 시스템 회로도 (1) | 2024.12.04 |
| 아두이노 태양광 추적기 (4) | 2024.12.04 |
| 키보드 자동화 샘플 코드 1 (1) | 2024.11.28 |
| 최소 기능 제품(MVP): 아이디어를 빠르게 검증해 볼 수 있는 방법 (2) | 2024.11.20 |
| Electromechanical 7 Segment Display (1) | 2024.11.10 |
| USB PD 충전기란 무엇인가요? 어떤 장점이 있나요? (6) | 2024.11.07 |
| 로봇 제작의 단계 분류 (8) | 2024.11.04 |
취업, 창업의 막막함, 외주 관리, 제품 부재!
당신의 고민은 무엇입니까? 현실과 동떨어진 교육, 실패만 반복하는 외주 계약,
아이디어는 있지만 구현할 기술이 없는 막막함.
우리는 알고 있습니다. 문제의 원인은 '명확한 학습, 실전 경험과 신뢰할 수 있는 기술력의 부재'에서 시작됩니다.
이제 고민을 멈추고, 캐어랩을 만나세요!
코딩(펌웨어), 전자부품과 디지털 회로설계, PCB 설계 제작, 고객(시장/수출) 발굴과 마케팅 전략으로 당신을 지원합니다.
제품 설계의 고수는 성공이 만든 게 아니라 실패가 만듭니다. 아이디어를 양산 가능한 제품으로!
귀사의 제품을 만드세요. 교육과 개발 실적으로 신뢰할 수 있는 파트너를 확보하세요.
캐어랩



