음식을 직접 테이블로 배달하는 비대면 서비스 로봇 "도비"
설계 방안
비대면 서비스 로봇의 설계함에 있어 가장 신경 써야 할 부분은 크게 다음과 같이 나눌 수 있다.
1. 안정성: 음식을 배달하는 로봇이기 때문에 로봇이 움직일 때 안정성을 우선적으로 고려해야 한다. 그리고 사람이나 장애물에 부딪히지 않도록 설계하고, 부딪히더라도 큰 사고로 이어지지 않도록 해야 한다. -사람이나 장애물을 회피하기 위해서 적외선 센서를 사용해 전방에 장애물이 있을 시 멈추도록 설계하였다. 그리고 만약 부딪히더라도 크게 다치지 않도록 둥근 형태의 로봇으로 제작하였다. 로봇의 내부에는 벽면에 프로파일을 붙여 튼튼하게 하였고, pcb기판을 사용해 만들어 놓은 회로의 선이 잘 빠지지 않도록 만들었다.
2. 최대 하중: 꽤나 큰 사이즈의 모바일 로봇이기 때문에 당연히 무게도 늘어날 것이고 음식을 올려놓게 되면 더욱 무거워진다. 그러므로 최대 하중을 신경 써서 설계에 임해야 한다. -로봇의 큰 무게를 버틸 수 있는 출력이 강한 모터를 사용하였고, 로봇의 밑판에 알루미늄 프로파일을 사용하여 높은 무게를 버틸 수 있도록 하였다.
3. 모터의 위치 및 바퀴의 개수: 모터의 위치, 바퀴의 개수를 어떻게 설계하는가에 따라 로봇의 제어 방식, 움직임이 변화한다. 우리가 제작하는 로봇에 맞는 모터의 위치와 바퀴의 개수를 찾아야 한다. -로봇의 특성상 제자리 회전을 해야 하는 경우가 많이 생긴다. 이를 실현하기 위해서 우리는 4개의 바퀴를 사용하였고 이를 십자 모양으로 배치한 뒤, 양쪽에 모터를 달았다. 이를 통해 안정적으로 제자리 회전을 하여 로봇이 움직일 수 있게 하였다.
4. 무게중심: 안정성과 연결되는 부분인데 음식을 나르는데 있어 무게중심이 맞지 않으면 음식을 떨어뜨리거나 흘리게 될 것이다. 이를 위해 무게중심을 잘 맞춰야 한다. -무게중심을 맞추기 위해 모터와 캐스터 휠의 높이를 최대한 맞추어서 제작하였고, 이후에 살짝 틀어지는 경우에는 캐스터 휠과 로봇 몸체의 결합 부분 사이에 높이를 높여줄 수 있는 소재를 부착하여 무게 중심을 맞췄다.
5. 회로설계의 용이성: 로봇의 틀만 제작하는 것이 아닌, 내부에 회로설계를 어떻게 할 것인 것 많은 신경을 써야 한다. 사람의 장기도 적절한 위치에 위치되어 있듯이 로봇의 내부도 적절한 위치에 회로를 둘 수 있도록 해야 한다. -모터의 밑판에 큰 구멍을 뚫는 등 회로 설계가 쉽게 제작하였다. 센서가 필요한 위치에 모두 구멍을 뚫어 회로 설계의 용이성을 높였다.
6. 부품의 결합 : 한번에 완성된 부품을 제작할 수는 없기 때문에 나누어져 있는 부품을 어떻게 결합할 것인지 생각해야 한다. -아크릴 판을 레이저 커팅 후 조립식으로 만들 수 있도록 끝부분을 톱니 모양으로 제작하였다.
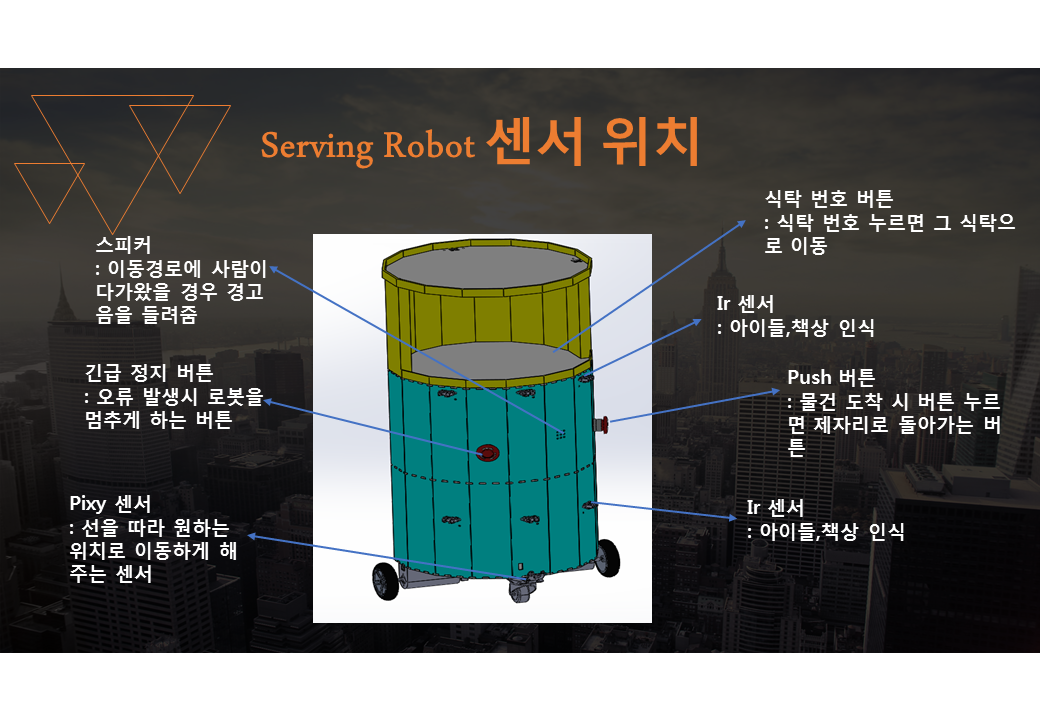
구성품 설명과 프로그래밍

순서도


'메이커 Maker' 카테고리의 다른 글
| 납땜 보조 도구 Soldering helping hand TE-802 (0) | 2022.04.27 |
|---|---|
| 혼술용 소맥 자동 제조기 SEOLU (0) | 2022.04.27 |
| 소음을 알려주는 Bird eye (0) | 2022.04.25 |
| 창문청소 로봇 작품 개발 완료 보고서 (0) | 2022.04.20 |
| 지하철 임산부 좌석 보호 시스템 (0) | 2022.04.12 |
| 칵테일 제조 서비스 로봇 (0) | 2022.04.06 |
| 반려견 동행을 도와주는 원격 조종 목줄 (0) | 2022.04.04 |
| 반려동물 공놀이 기구, 놀아주개 작품 소개 (0) | 2022.03.30 |
취업, 창업의 막막함, 외주 관리, 제품 부재!
당신의 고민은 무엇입니까? 현실과 동떨어진 교육, 실패만 반복하는 외주 계약,
아이디어는 있지만 구현할 기술이 없는 막막함.
우리는 알고 있습니다. 문제의 원인은 '명확한 학습, 실전 경험과 신뢰할 수 있는 기술력의 부재'에서 시작됩니다.
이제 고민을 멈추고, 캐어랩을 만나세요!
코딩(펌웨어), 전자부품과 디지털 회로설계, PCB 설계 제작, 고객(시장/수출) 발굴과 마케팅 전략으로 당신을 지원합니다.
제품 설계의 고수는 성공이 만든 게 아니라 실패가 만듭니다. 아이디어를 양산 가능한 제품으로!
귀사의 제품을 만드세요. 교육과 개발 실적으로 신뢰할 수 있는 파트너를 확보하세요.
캐어랩



