무겁다. 산을 짊어진 것도 아닌데 무겁다. 다르게 살아보기로 시작한 지 얼마나 되었다고 게으름을 피고 합리화를 하고 벌써 지면 어떡하란 말인가. 여하튼 모르겠다. 매일매일 넘어뜨려야 하는 가장 작은 도미노를 찾아 해 나가는 수밖에 없다.
스마트 IoT 액츄에이터는 워터펌프, 팬, DC모터, 부저, 서보모터, RGB LED, LED 전등까지 7개로 구성하였다. 파일 이름은 actutest.c 로 코드를 입력한다. 전체 구성품을 테스트하는 코드를 맨 아래에 첨부한다.
자세한 도면은 제외하고 라즈베리파이와 7종의 액츄에이터를 연결한 개략적인 연결 블럭도를 아래에 나타낸다. 라즈베리파이 3.3V 출력 신호가 결국 12V로 동작하는 액튜에이터를 동작시키는 회로가 중간에 포함된다. 단지 그것뿐이다.
라즈베리파이에 많은 센서와 액츄에이터를 연결하므로 아래와 같은 센서 입출력 보드를 만들었다. 8종의 센서와 7종의 액츄에이터를 연결한다. 센서 보드의 커넥터 할당을 보여준다.
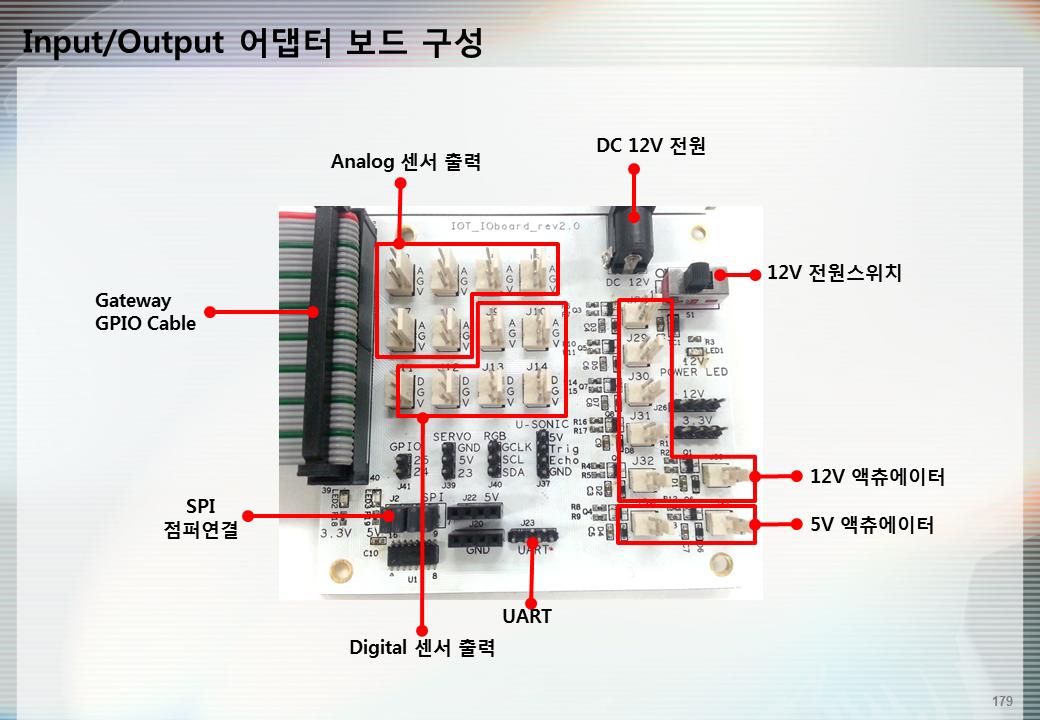
각 커넥터에 연결한 센서와 액츄에이터 연결을 보여준다. 할당은 절대적인 것은 아니다. 위치를 달리해 연결했다면 GPIO 번호를 프로그램에서 일치하기만 한다면 동작에는 이상 없다.

센서와 액츄에이터에 할당한 GPIO Wiring Pi 핀 번호를 나타낸다. 아래 코드를 보면 GPIO 핀 번호가 WiringPi 라이브러리 핀 번호에 맞게 할당한 것을 볼 수 있다.

아래 할당한 액츄에이터 전체를 동작시키고 테스트하는 코드를 참고하기 바란다.


각 구성품 테스트 링크는 아래 포스팅을 참고한다.

전체 테스트 코드는 아래와 같다. 1~8번 까지 실행하고 빠져나오는 코드가 있으며, 자세한 컴파일, 실행 방법은 코드 아래에서 설명한다.
#include <stdio.h>
#include <string.h>
#include <errno.h>
#include <wiringPi.h>
#include "softServo.h"
#define PUMP 21 // BCM_GPIO 5
#define FAN 22 // BCM_GPIO 6
#define DCMOTOR 23 // BCM_GPIO 13
#define BUZCONTROL 28 //GPIO 20
#define RCSERVO 23 //GPIO 23
#define servopwron 27 //27
#define RGBLEDPOWER 24 //BCM_GPIO 19
#define RED 7
#define GREEN 8
#define BLUE 9
#define LEDBAR 26 // BCM_GPIO 12
void Bplus_pinmodeset(void);
int testmode(void);
int wiringPicheck();
int main (void)
{
if(wiringPicheck()) printf("Fail\n");
Bplus_pinmodeset();
while(1)
{
int exit;
exit = testmode();
if(exit == 1) break;
}
return 0;
}
int wiringPicheck(void)
{
if (wiringPiSetup () == -1)
{
fprintf(stdout, "Unable to start wiringPi: %s\n", strerror(errno));
return 1 ;
}
}
void Bplus_pinmodeset(void)
{
pinMode (PUMP, OUTPUT);
pinMode (FAN, OUTPUT);
pinMode (DCMOTOR, OUTPUT);
pinMode (BUZCONTROL, OUTPUT);
pinMode (LEDBAR, OUTPUT) ;
pinMode(RGBLEDPOWER, OUTPUT);
pinMode(RED, OUTPUT);
pinMode(GREEN, OUTPUT);
pinMode(BLUE,OUTPUT);
}
int testmode(void)
{
int testnum;
char stop;
printf("Input Number for Smart Farm Actuator Test(1 ~ 4) and Enter !!! \n");
printf("1. Water Pump Test\n");
printf("2. Fan Test\n");
printf("3. DC Motor Test\n");
printf("4. Buzzer Test\n");
printf("5. Servo Motor Test\n");
printf("6. RGB LED Test\n");
printf("7. LED BAR Test\n");
printf("8. Exit\n");
scanf("%d", &testnum);
if(testnum == 1)
{
printf("here - pump on\n");
digitalWrite (PUMP, 1) ; // On
delay (2000) ; // ms
digitalWrite (PUMP, 0) ; // Off
delay (2000) ;
}
if(testnum == 2)
{
printf("here - pump on\n");
digitalWrite (FAN, 1) ; // On
delay (2000) ; // ms
digitalWrite (FAN, 0) ; // Off
delay (2000) ;
}
if(testnum == 3)
{
digitalWrite(DCMOTOR, 1); //On
delay (2000) ; // ms
digitalWrite(DCMOTOR, 0); //OFF
}
if(testnum == 4)
{
digitalWrite(BUZCONTROL, 1);
delay(1000);
digitalWrite(BUZCONTROL, 0);
delay(1000);
scanf("%c", &stop);
if(stop == 'c') digitalWrite (BUZCONTROL, 0) ;
digitalWrite (BUZCONTROL, 0) ;
}
if(testnum == 5)
{
if (wiringPiSetupGpio() == -1)
return 1 ;
softServoSetup(RCSERVO,-1,-1,-1,-1,-1,-1,-1);
int i=0;
pinMode(servopwron, OUTPUT);
delay(1000);
digitalWrite(servopwron, 1);
for( i= 0; i<1 ; i++){
printf("rc servo on \n");
delay(1000);
softServoWrite(RCSERVO, -250);
delay(3000);
printf("rc servo off \n");
softServoWrite(RCSERVO, 1250);
delay(3000);
}
printf("rc servo test end \n");
digitalWrite(servopwron, 0);
}
if(testnum == 6)
{
digitalWrite(RGBLEDPOWER, 1); // power on
digitalWrite(RED, 1);
delay(500);
digitalWrite(RED, 0);
digitalWrite(GREEN, 1);
delay(500);
digitalWrite(GREEN, 0);
digitalWrite(BLUE, 1);
delay(500);
digitalWrite(BLUE, 0);
digitalWrite(RGBLEDPOWER, 0); // power off
}
if(testnum == 7)
{
printf("here - Led Bar on on\n");
digitalWrite (LEDBAR, 1) ; // On
delay (1000) ; // ms
printf("here - Led Bar on on\n");
digitalWrite (LEDBAR, 0) ; // Off
delay (1000) ;
}
if(testnum == 8)
{
return 1;
}
return 0;
}
우선 폴더를 이동한다. $cd all_actutest
컴파일 명령은 아래와 같고, 서보 모터를 제어하기 위해 헤더 파일을 포함한 것에 주의한다.
$ gcc -o actutest actutest.c softServo.c -lwiringPi
컴파일이 잘 실행되었다면 실행은 아래 명령어로 진행한다. 한 가지 주의할 점은 5번 서보모터 동작 실행 후 6번과 7번이 동작하지 않는데 이것은 서보모터 핀 번호가 BCM GPIO 번호로 실행을 해서 나타나는 현상인데 프로그램을 종료하고 다시 $sudo ./actutest 를 실행하여 6번과 7번을 실행하면 이상없이 동작한다. ^^
실행은
$sudo ./actutest
하~ 끝났다. 어서 나가서 놀고 싶다. 5월의 날은 이렇게 좋은데 말이다.
pi@raspberrypi:~ $
pi@raspberrypi:~ $ cd all_actutest/
pi@raspberrypi:~/all_actutest $ ls
actutest buzcontrol.c ledbar lightcontrol.c rcservo rgbtest.c
actutest.c dcmotoron ledbar.c motorsoftpwm rcservo.c softPwm.c
allrgbcolor dcmotoron.c ledbarsoftpwm motorsoftpwm.c rgbfade softPwm.h
allrgbcolor.c fanon ledbarsoftpwm.c pumpon rgbfade.c softServo.c
buzcontrol fanon.c lightcontrol pumpon.c rgbtest softServo.h
pi@raspberrypi:~/all_actutest $ sudo ./actutest
Input Number for Smart Farm Actuator Test(1 ~ 4) and Enter !!!
1. Water Pump Test
2. Fan Test
3. DC Motor Test
4. Buzzer Test
5. Servo Motor Test
6. RGB LED Test
7. LED BAR Test
8. Exit
1
here - pump on
Input Number for Smart Farm Actuator Test(1 ~ 4) and Enter !!!
1. Water Pump Test
2. Fan Test
3. DC Motor Test
4. Buzzer Test
5. Servo Motor Test
6. RGB LED Test
7. LED BAR Test
8. Exit
'개발자 > 라즈베리파이4' 카테고리의 다른 글
| 라즈베리파이 i2c lcd display 제어 (1) | 2022.09.02 |
|---|---|
| 라즈베리파이 FND Flexible Numeric Display 제어 (4) | 2022.08.31 |
| 라즈베리파이 FAN 제어 실습 코드 (1) | 2022.08.30 |
| 라즈베리파이 부저 제어 (0) | 2022.08.29 |
| 라즈베리파이4 led bar 실습 코드 (1) | 2022.06.27 |
| 라즈베리파이4 rgb led 코드 (1) | 2022.06.23 |
| 라즈베리파이 4 서보 모터 실습 코드 (1) | 2022.06.22 |
| 라즈베리파이4 오디오 Jack 설정 (2) | 2022.06.21 |
취업, 창업의 막막함, 외주 관리, 제품 부재!
당신의 고민은 무엇입니까? 현실과 동떨어진 교육, 실패만 반복하는 외주 계약,
아이디어는 있지만 구현할 기술이 없는 막막함.
우리는 알고 있습니다. 문제의 원인은 '명확한 학습, 실전 경험과 신뢰할 수 있는 기술력의 부재'에서 시작됩니다.
이제 고민을 멈추고, 캐어랩을 만나세요!
코딩(펌웨어), 전자부품과 디지털 회로설계, PCB 설계 제작, 고객(시장/수출) 발굴과 마케팅 전략으로 당신을 지원합니다.
제품 설계의 고수는 성공이 만든 게 아니라 실패가 만듭니다. 아이디어를 양산 가능한 제품으로!
귀사의 제품을 만드세요. 교육과 개발 실적으로 신뢰할 수 있는 파트너를 확보하세요.
캐어랩



