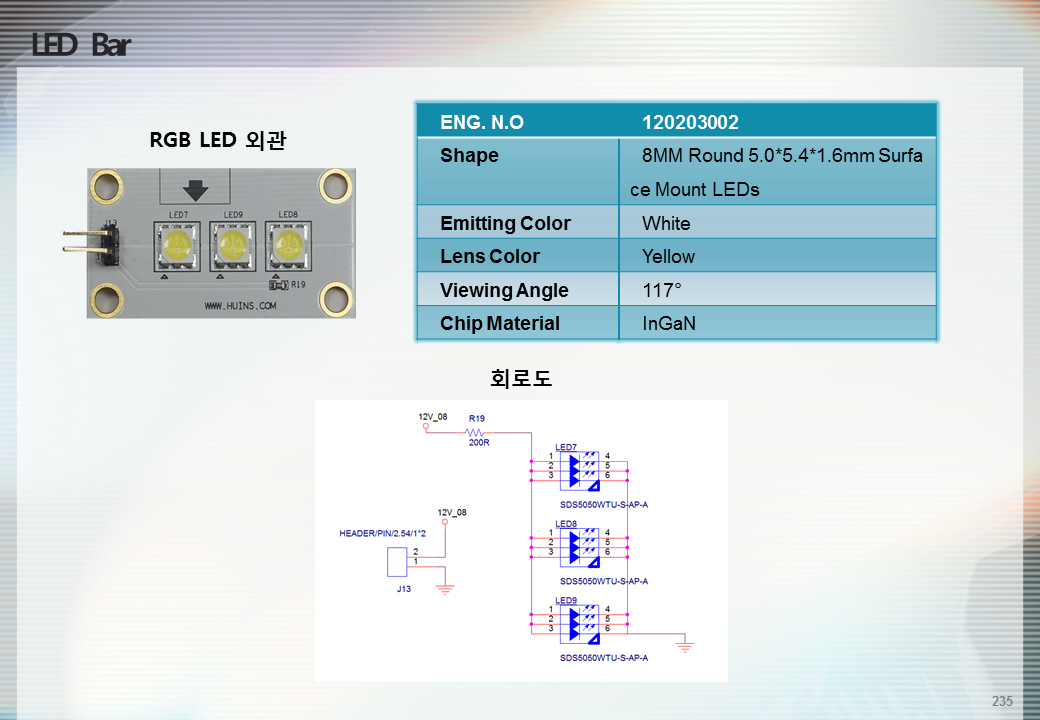
LED Bar는 직접 PCB를 제작하여 밝은 LED 3개를 병렬로 연결하여 전등 효과를 내기 위한 액츄에이터다. LED chip에 대한 기술적 스펙은 아래와 같다.
| ENG. No 120203002 | 120203002 |
| Shape | 8MM Round 5.0*5.4*1.6mm Surface Mount LEDs |
| Emitting Color | White |
| Lens Color | Yellow |
| Viewing Angle | 117° |
| Chip Material | InGaN |
led bar를 설계한 회로도는 아래 이미지를 참고한다.
- 파일 이름: lightcontrol.c
- 소스코드: 할당된 gpio 번호는 예고 없이 변경할 수 있습니다.
led 전등 테스트 코드
#include <signal.h> //Signal 사용 헤더파일
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h> //exit() 사용 헤더파일
#include <wiringPi.h>
#define LEDBAR 26 // BCM_GPIO 12
void sig_handler(int signo); // 마지막 종료 함수
int main (void)
{
signal(SIGINT, (void *)sig_handler); //시그널 핸들러 함수
if (wiringPiSetup () == -1)
{
fprintf(stdout, "Unable to start wiringPi: %s\n", strerror(errno));
return 1 ;
}
pinMode (LEDBAR, OUTPUT) ;
for (;;)
{
printf("here - Led Bar on on\n");
digitalWrite (LEDBAR, 1) ; // On
delay (200) ; // ms
printf("here - Led Bar on on\n");
digitalWrite (LEDBAR, 0) ; // Off
delay (200);
}
return 0 ;
}
void sig_handler(int signo)
{
printf("process stop\n");
digitalWrite (LEDBAR, 0) ; // Off
exit(0);
}
아래 코드는 PWM 방식으로 led bar를 제어하는 코드이다. thread를 사용하므로 컴파일할 때 반드시 thread 라이브러리를 추가해주어야 한다. pwm 제어 설명은 아래 이미지를 참고한다.

파일 이름: ledbarsoftpwm
컴파일 명령은
$gcc –o ledbarsoftpwm ledbarsoftpwm .c –l wiringPi –lpthread
소스코드
#include <signal.h> //Signal 사용 헤더파일
#include <stdio.h>
#include <string.h>
#include <errno.h>
#include <stdlib.h> //exit() 사용 헤더파일
#include <wiringPi.h>
#include <softPwm.h>
//#define MOTORCONTROL 22 //GPIO 6 - Motor
#define LEDCONTROL 26// LED Bar
//const int LEDCONTROL 21 //
void sig_handler(int signo); // SIGINT 핸들러 함수
int main (void)
{
if(wiringPicheck()) printf("Fail\n");
signal(SIGINT, (void *)sig_handler);
pinMode (LEDCONTROL, OUTPUT);
softPwmCreate(LEDCONTROL, 0, 100);
int i;
int delaytime = 300;
while(1)
{
printf("here \n");
softPwmWrite(LEDCONTROL, 10);
delay(delaytime);
softPwmWrite(LEDCONTROL, 20);
delay(delaytime);
softPwmWrite(LEDCONTROL, 30);
delay(delaytime);
softPwmWrite(LEDCONTROL, 40);
delay(delaytime);
softPwmWrite(LEDCONTROL, 50);
delay(delaytime);
softPwmWrite(LEDCONTROL, 60);
delay(delaytime);
softPwmWrite(LEDCONTROL, 70);
delay(delaytime);
softPwmWrite(LEDCONTROL, 80);
delay(delaytime);
softPwmWrite(LEDCONTROL, 90);
delay(delaytime);
softPwmWrite(LEDCONTROL, 100);
delay(delaytime);
softPwmWrite(LEDCONTROL, 0);
delay(delaytime);
}
return 0 ;
}
int wiringPicheck(void)
{
if (wiringPiSetup () == -1)
{
fprintf(stdout, "Unable to start wiringPi: %s\n", strerror(errno));
exit(1) ;
}
}
void Bpluspinmodeset(void)
{
pinMode (LEDCONTROL, OUTPUT);
}
void sig_handler(int signo) // ctrl-c 로 종료시 실행되는 함수
{
printf("process stop\n");
digitalWrite(LEDCONTROL, 0);
exit(0);
}
고생하셨습니다. ^^
'개발자 > 라즈베리파이4' 카테고리의 다른 글
| 라즈베리파이 FND Flexible Numeric Display 제어 (4) | 2022.08.31 |
|---|---|
| 라즈베리파이 FAN 제어 실습 코드 (1) | 2022.08.30 |
| 라즈베리파이 부저 제어 (0) | 2022.08.29 |
| 라즈베리파이4 액츄에이터 7종 제어 C 언어 (0) | 2022.06.29 |
| 라즈베리파이4 rgb led 코드 (1) | 2022.06.23 |
| 라즈베리파이 4 서보 모터 실습 코드 (1) | 2022.06.22 |
| 라즈베리파이4 오디오 Jack 설정 (2) | 2022.06.21 |
| 라즈베리파이4 부저 buzzer 실습 코드 (1) | 2022.06.20 |
취업, 창업의 막막함, 외주 관리, 제품 부재!
당신의 고민은 무엇입니까? 현실과 동떨어진 교육, 실패만 반복하는 외주 계약,
아이디어는 있지만 구현할 기술이 없는 막막함.
우리는 알고 있습니다. 문제의 원인은 '명확한 학습, 실전 경험과 신뢰할 수 있는 기술력의 부재'에서 시작됩니다.
이제 고민을 멈추고, 캐어랩을 만나세요!
코딩(펌웨어), 전자부품과 디지털 회로설계, PCB 설계 제작, 고객(시장/수출) 발굴과 마케팅 전략으로 당신을 지원합니다.
제품 설계의 고수는 성공이 만든 게 아니라 실패가 만듭니다. 아이디어를 양산 가능한 제품으로!
귀사의 제품을 만드세요. 교육과 개발 실적으로 신뢰할 수 있는 파트너를 확보하세요.
캐어랩


